倒车是每个驾驶员都需要掌握的技巧,在倒车过程中如何判断后面距离是非常重要的。同时,停车时也需要注意车尾与边缘的距离,以确保不超出停车位。下面详细介绍倒车如何判断后面距离和如何判断车尾距离。

倒车雷达的作用
首先,倒车雷达是一种基础泊车辅助系统,它几乎覆盖了当前市场上的所有车型。倒车雷达由超声波传感器、控制器和蜂鸣器三部分组成。
当工作时,超声波传感器对外发出超声波,撞击到障碍物后反射回来并被传感器接收,控制器通过时间计算障碍物的实际距离,最后再通过蜂鸣器发出急促的警报声提示驾驶员。

通过倒车雷达的声音来判断距离
倒车雷达发出的声音为一定频率的“滴滴”声,频率越快说明障碍物距离越近。当频率不断加快,并最终长鸣,则说明倒车距离已经基本达到极限,此时应尽量避免再继续倒车。

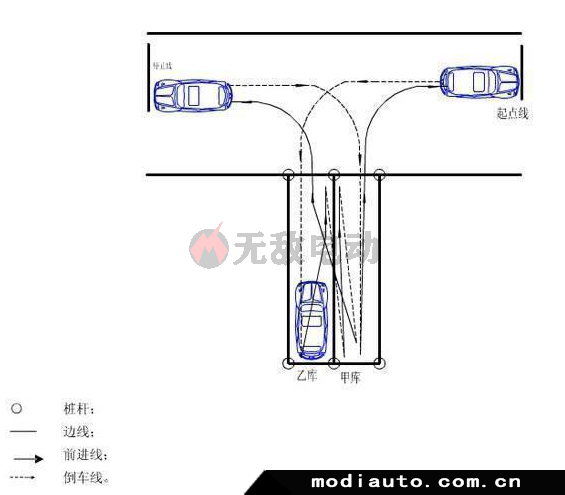
倒车过程中判断车尾与边线的距离
1、首先,当车辆进入库位并调整好车身位置后,观察左后视镜下沿与边线的位置,找到入库后停车的最准确位置。
2、接着,在回正方向倒车时,观察左后视镜和边线之间的距离,当后视镜刚好遮挡住边线时立即踩下离合器刹车停车。
3、这是入库后停车的最准确位置,即左后视镜刚刚遮盖住边线的瞬间。

4、需要注意的是,每个人的身高不同,所以看的倒库停车点也不同。可以让教练将车停在库位内,然后自己再上车调整好座椅后视镜找自己的停车点。
5、一般来说,个子高的人需要在后视镜下沿刚好到达边线外侧时停车,而个子矮的学员则需要在后视镜下沿过了边线内侧后才停车。
通过倒车雷达和观察后视镜与边线的位置可以有效地判断倒车过程中的距离问题,学会这些技巧可以帮助驾驶员更加安全地完成倒车和停车。